竞赛动态 2020-10-09 21:36
1. 任务
利用TI的MSP430/MSP432平台,设计制作一个四轮电动小车。要求小车能沿着指定路线在坡道上自动循迹骑线行驶。小车必须独立运行,车外不能使用任何设备(包括电源)。小车(含电池)重量小于1.5kg,外形尺寸在地面投影不大于25cm×25cm。坡道用长、宽约1m的细木工板制作,允许板上有木质本色及自然木纹。木工板表面铺设画有1cm×1cm黑白间隔的纸条(以下简称为标记线)作为路线指示;标记线起始段为直线,平行于木板两边;标记线在坡顶转向90°,转弯半径20cm;标记线平行坡顶距离≥30cm,距坡顶距离≤20cm;标记线总长度为1m。停车标记为宽1cm长5cm的黑色线条,垂直于坡顶标记线。小车坡度角示意及行驶线路顶视图如图1所示。
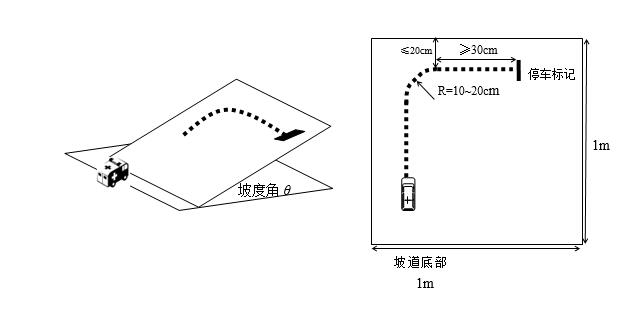
图1 小车坡道角示意及行驶线路顶视图
2. 要求
(1)坡度角θ=0°,电动小车能够沿标记线自动骑线行驶,在停车点停车;小车上标记点到停车标记中心线的垂直距离误差≤2cm。停车时立即发出声音提示。小车行驶过程中,其地面投影不得脱离标记线。(15分)
(2)在完成(1)的基础上,电动小车能够设定行驶时间,自动控制小车匀速通过1米长的线路,在停车点停车。行驶时间可在10s~20s间设定。误差绝对值≤1s。行驶过程中不得碾压、脱离标记线。时间误差每超过1s扣1分。(20分)
(3)坡度角θ=10°,完成要求(2)的动作。(20分)
(4)可任意指定坡度角θ在11°~30°,完成要求(2)的动作。(20分)
(5)在完成(4)后,尽量增加坡度角θ,完成要求(2)动作。(20分)
(6)其他。(5分)
(7)设计报告: (20分)
项 目 | 主要内容 | 满分 |
方案论证 | 比较与选择,方案描述 | 3 |
理论分析与计算 | 系统相关参数设计 | 5 |
电路与程序设计 | 系统组成,原理框图与各部分的电路图,系统软件与流程图 | 5 |
测试方案与测试结果 | 测试结果完整性,测试结果分析 | 5 |
设计报告结构及规范性 | 摘要,正文结构规范,图表的完整与准确性。 | 2 |
总分 | 20 | |
3. 说明
(1)本题目必须使用指定的MSP430/MSP432平台。并将该平台置于显著位置便于评测。不得另外使用其它CPU控制芯片。
(2)不得采用履带小车及带刺轮胎。小车轮胎采用橡胶塑料等柔性材质,不得在其表面涂抹粘性物质等。行驶路面不得铺设除标记线外的任何材料。小车全程在木工板上行驶。
(3)小车设定模式后自动行驶,中途不得人工介入控制。在要求(2)~(5)的测试中,小车应匀速行驶。停顿、打滑、碾压标记线每次扣除2分。
(4)小车标记点:小车到达停车线的标记点自定,并在行驶前明确标记在车体上,以便测量。
(5)所有测试中,行驶过程时间超过30s、小车投影脱离标记线或停车误差超过2cm,均视为失败。
(6)要求(5)中最大角度的测试,θ由选手自己选定。
(7)每项测试过程允许测试两次,取最好成绩。坡度角可以用安卓手机上的“指南针”APP软件测量。
一往无前,看德州仪器(TI)如何为梦想着色!
![]() 2020-09-30 08:54
2020-09-30 08:54

2020 年 TI 杯模拟电子系统设计专题邀请赛赛题汇总
![]() 2020-09-25 15:18
2020-09-25 15:18
目标跟踪系统(D题)
![]() 2020-09-25 14:40
2020-09-25 14:40
包络跟踪电源供电的功率放大器(C题)
![]() 2020-09-25 14:22
2020-09-25 14:22
多种幅度调制信号发生电路(B题)
![]() 2020-09-25 13:57
2020-09-25 13:57